About
I'm a full-stack robotics engineer with a background in mechanical engineering. I love the process of taking ideas from drawing board to a reliable system that can actually survive in the real world.
I studied robotics at Northwestern, and I'm currently developing helpful robots at Sunday.
Robotic Systems Engineer
M.S. in Robotics
Feel free to reach out about robotics, engineering, or collaboration via my email.


Featured Projects
-
BiDexHand: 16-DoF Open-Source Biomimetic Dexterous Hand
I've always been fascinated by the complexity and dexterity of the human hand, one of our most remarkable tools. In this project, I did full-stack robot development of an anthropomorphic hand that replicates human dexterity using cable-driven mechanisms.
Dexterous Hand Cable Driven Actuators Rapid Prototyping Computer Vision -
LeFranX: Behavior Cloning Franka & XHand with LeRobot
Imitation learning has been gaining popularity for robot motor skill acquisition. In this project, I explored different policy architectures, and created a framework for training visuoservo policy on my Franka FER and XHand robot combo based on the LeRobot library.
Imitation Learning Action Chuncking with Transformers Diffusion Policy Python
Professional Work
-
Monarch Endoscopic Surgical Platform - Johnson & Johnson MedTech
While working as a senior mechanical engineer at J&J, I was mainly responsible for hardware system design on the Monarch Surgical Platform, the first robotic platform for minimally invasive diagnostic and therapeutic procedures in the lungs and kidneys.
I worked on many projects related to the robotic arm and instrument manipulator, both on the hardware and software front.
Robotic Arm & Manipulator Design Surgical Robotics Controls & Calibration Tools -

Yomi S Surgical Robot - Neocis Inc.
Neocis Inc. is a surgical robotics company focused on dental implant space, and the developer of Yomi, the only FDA cleared dental surgical platform.
I designed and developed joint actuators for a 7-dof robot arm and many peripheral systems around them on the second generation Yomi S system.
Robotic Actuator Precision Mechatronics Robot Calibration System Integration -
Harmony SHR - Harmonic Bionics Inc.
Harmonic Bionics Inc. is the developer of Harmony SHR, an exoskeleton designed for upper extremity functional therapy.
I developed Harmony SHR platform and pre-market prototypes as a mechanical engineer co-op. I was responsible for a major CAD service region, and designed components using various manufacturing techniques.
Exoskeleton Mechatronic Systems Structural Analysis Rapid Prototyping
Software & Tools
-
Hand Tracking Streamer: Meta Quest VR App for tracking and streaming hand and wrist landmark telemetry
Hand Tracking Streamer is a lightweight hand telemetry utility that turns a Meta Quest headset into a precision controller for robotics teleoperation and motion capture.
Built on the Meta Interaction SDK, it streams 21-landmark hand data and 6-DoF wrist pose to a PC in real time, making it suitable for robot control, imitation learning, and gesture-based prototyping.
Mixed Reality Hand Tracking Unity Engine Teleoperation
Research & Explorations
-

B.D. Bach: BiDexHand Plays Bach
Playing a musical instrument is the epitome of human dexterity, requiring precision control, coordination, and real-time manipulation with feedback. In this project, I teach BiDexHand to play Baroque music with me, starting from J.S. Bach's Well-Tempered Klavier.
Dexterous Manipulation Kinematic Control Robot Calibration C++ -
Impedance Control with MuJoCo Simulations
Impedance control lets robots interact more naturally by shaping how they respond to forces during contact. In this project, I use MuJoCo to simulate and compare different impedance-control strategies, examining how each affects compliance and manipulation performance.
MuJoCo Impedance Control Admittance Control Simulation Python -
FrankaVRTeleop: Teleoperating Franka Robot with VR Headsets
Open-source, high-performance teleoperation library for the Franka FER robots and more.
Robot Teleoperation Inverse Kinematics Mixed Reality C++ -
Apex Putter: Robotic Mini-Golf
Love a game of putt-putt? Check out how machine learning, computer vision, and kinematic control turn the Franka FER Robot into a mini-golf ace - sinking hole-in-ones from anywhere like a champ.
ROS2 Robot Calibration Computer Vision Machine Learning -
PenStealer: PincherX100 Grab-A-Pen
It's not every day you get to teach a robot how to pass a pen like a teammate. In this project, I calibrated a Trossen Robotics PincherX100 robot arm using an RGB-D camera. The arm was tasked to locate, pick up a pen, and hand it off to other robots.
Robot Calibration Computer Vision Kinematic Control -
RGBPointNet: RGB Point Cloud Based Object Classification
Point clouds are common data format used in robotics. In this project, we implemented a custom PointNet architecture and augmented it with RGB color on the point cloud to classify objects in a custom dataset we generated.
Machine Learning Multilayer Perceptron PointNet RGB Augmentation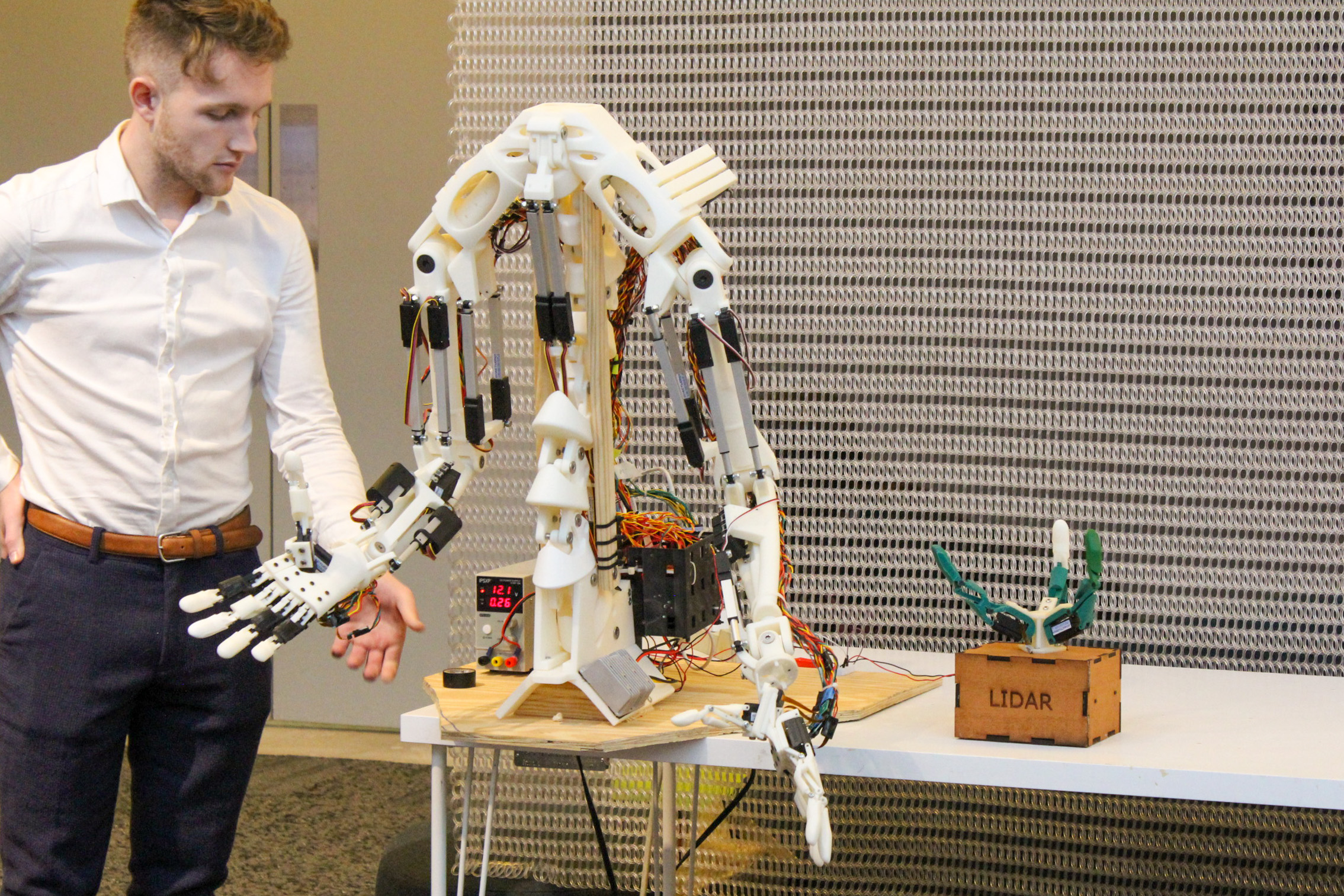
Athena - Laboratory for Intelligent Decision and Autonomous Robots - Georgia Tech
The Laboratory for Intelligent Decision and Autonomous Robots (LIDAR Lab) led by Prof. Ye Zhao at GaTech focuses research on robotic system and interactions.
While in LIDAR, I led a sub-team of 7 undergraduate students and worked on designing, fabricating and integrating a biomimetic upper body robot, Athena. My team focused on designing and characterizing mechatronics systems that emulate human muscle architecture.
Biomimetic Robot Mechatronics CAD Optimization System Integration
Assistive Hip Exoskeleton - Exoskeleton and Prosthetics Intelligent Control Lab - Georgia Tech
The Exoskeleton and Prosthetic Intelligent Controls (EPIC) Lab at Georgia Tech, led by Professor Aaron Young, is devoted to the design and improvement of powered orthotic and prosthetic control systems.
While in EPIC, I worked on the Assistive Hip Exoskeleton project as an undergraduate RA. I designed and machined the housings and most major components on the series elastic actuators of the hip exo.
Exoskeleton Series Elastic Actuators Mechanical Design